转自:https://www.cnblogs.com/xckxue/p/8685675.html
介绍
synchronized是一种独占式的重量级锁,在运行到同步方法或者同步代码块的时候,让程序的运行级别由用户态切换到内核态,把所有的线程挂起,通过操作系统的指令,去调度线程。这样会频繁出现程序运行状态的切换,线程的挂起和唤醒,会消耗系统资源,为了提高效率,引入了偏向锁、轻量级锁、尽量让多线程访问公共资源的时候,不进行程序运行状态的切换。
synchronized实现原理
synchronized是在jvm中实现,是基于进入和退出Monitor对象来实现方法和代码块的同步
同步代码块:
monitorenter指令插入到同步代码块的开始位置,monitorexit指令插入到同步代码块的结束位置,JVM需要保证每一个monitorenter都有一个monitorexit与之相对应。任何对象都有一个monitor与之相关联,当且一个monitor被持有之后,他将处于锁定状态。线程执行到monitorenter指令时,将会尝试获取对象所对应的monitor所有权,即尝试获取对象的锁;
同步方法
synchronized方法则会被翻译成普通的方法调用和返回指令如:invokevirtual、areturn指令,有一个ACC_SYNCHRONIZED标志,JVM就是通过该标志来判断是否需要实现同步的,具体过程为:当线程执行该方法时,会先检查该方法是否标志了ACC_SYNCHRONIZED,如果标志了,线程需要先获取monitor,获取成功后才能调用方法,方法执行完后再释放monitor,在该线程调用方法期间,其他线程无法获取同一个monitor对象。其实本质上和synchronized块相同,只是同步方法是用一种隐式的方式来实现,而不是显式地通过字节码指令。
synchronized 作用
- 确保线程互斥的访问同步代码
- 保证共享变量的修改能够及时可见
- 有效解决重排序问题
Java中每一个对象都可以作为锁,这是synchronized实现同步的基础:
- 普通同步方法,锁是当前实例对象
- 静态同步方法,锁是当前类的class对象
- 同步方法块,锁是括号里面的对象
自旋概念
互斥同步对性能最大的影响是阻塞的实现,挂起线程和恢复线程的操作都需要转入内核态中完成,这些操作给系统的并发性能 带来了很大的压力。同时,虚拟机的开发团队也注意到在许多应用上,共享数据的锁定状态只会持续很短的一段时间,为了这段时间去挂起和恢复线程并不值得。如 果物理机器有一个以上的处理器,能让两个或以上的线程同时并行执行,我们就可以让后面请求锁的那个线程“稍等一会”,但不放弃处理器的执行时间,看看持有 锁的线程是否很快就会释放锁。为了让线程等待,我们只须让线程执行一个忙循环(自旋),这项技术就是所谓的自旋锁。
—>自旋锁在JDK 1.4.2中就已经引入,只不过默认是关闭的,可以使用-XX:+UseSpinning参数来开启,在JDK 1.6中就已经改为默认开启了。自旋等待不能代替阻塞,且先不说对处理器数量的要求,自旋等待本身虽然避免了线程切换的开销,但它是要占用处理器时间的, 所以如果锁被占用的时间很短,自旋等待的效果就会非常好,反之如果锁被占用的时间很长,那么自旋的线程只会白白消耗处理器资源,而不会做任何有用的工作, 反而会带来性能的浪费。因此自旋等待的时间必须要有一定的限度,如果自旋超过了限定的次数仍然没有成功获得锁,就应当使用传统的方式去挂起线程了。自旋次 数的默认值是10次,用户可以使用参数-XX:PreBlockSpin来更改。
—>在JDK 1.6中引入了自适应的自旋锁。自适应意味着自旋的时间不再固定了,而是由前一次在同一个锁上的自旋时间及锁的拥有者的状态来决定。如果在同一个锁对象 上,自旋等待刚刚成功获得过锁,并且持有锁的线程正在运行中,那么虚拟机就会认为这次自旋也很有可能再次成功,进而它将允许自旋等待持续相对更长的时间, 比如100个循环。另一方面,如果对于某个锁,自旋很少成功获得过,那在以后要获取这个锁时将可能省略掉自旋过程,以避免浪费处理器资源。有了自适应自 旋,随着程序运行和性能监控信息的不断完善,虚拟机对程序锁的状况预测就会越来越准确,虚拟机就会变得越来越“聪明”了。
锁削除
锁削除是指虚拟机即时编译器在运行时,对一些代码上要求同步,但是被检测到不可能存在共享数据竞争的锁进行削除。锁削除的主要判定依据来源于逃逸分析的数据支持,如果判断到一段代码中,在堆上的所有数据都不会逃逸出去被其他线程访问到,那就可以把它们当作栈上数据对待, 认为它们是线程私有的,同步加锁自然就无须进行。
变量是否逃逸,对于虚拟机来说需要使用数据流分析来确定,但是程序员自己应该是很清楚的,怎么会在明知道不存在数据争用的 情况下要求同步呢?答案是有许多同步措施并不是程序员自己加入的,同步的代码在Java程序中的普遍程度也许超过了大部分读者的想象。比如:(只是说明概念,但实际情况并不一定如例子)在线程安全的环境中使用stringBuffer进行字符串拼加。则会在java文件编译的时候,进行锁销除。
锁粗化
我们在编写代码的时候,总是推荐将同步块的作用范围限制得尽量小——只在共享数据的实际作用域中才进行同步,这样是为了使得需要同步的操作数量尽可能变小,如果存在锁竞争,那等待锁的线程也能尽快地拿到锁。
大部分情况下,上面的原则都是正确的,但是如果一系列的连续操作都对同一个对象反复加锁和解锁,甚至加锁操作是出现在循环体中的,那即使没有线程竞争,频繁地进行互斥同步操作也会导致不必要的性能损耗。如果虚拟机探测到有这样一串零碎的操作都对同一个对象加锁,将会把加锁同步的范围扩展(锁粗化)到整个操作序列的外部。
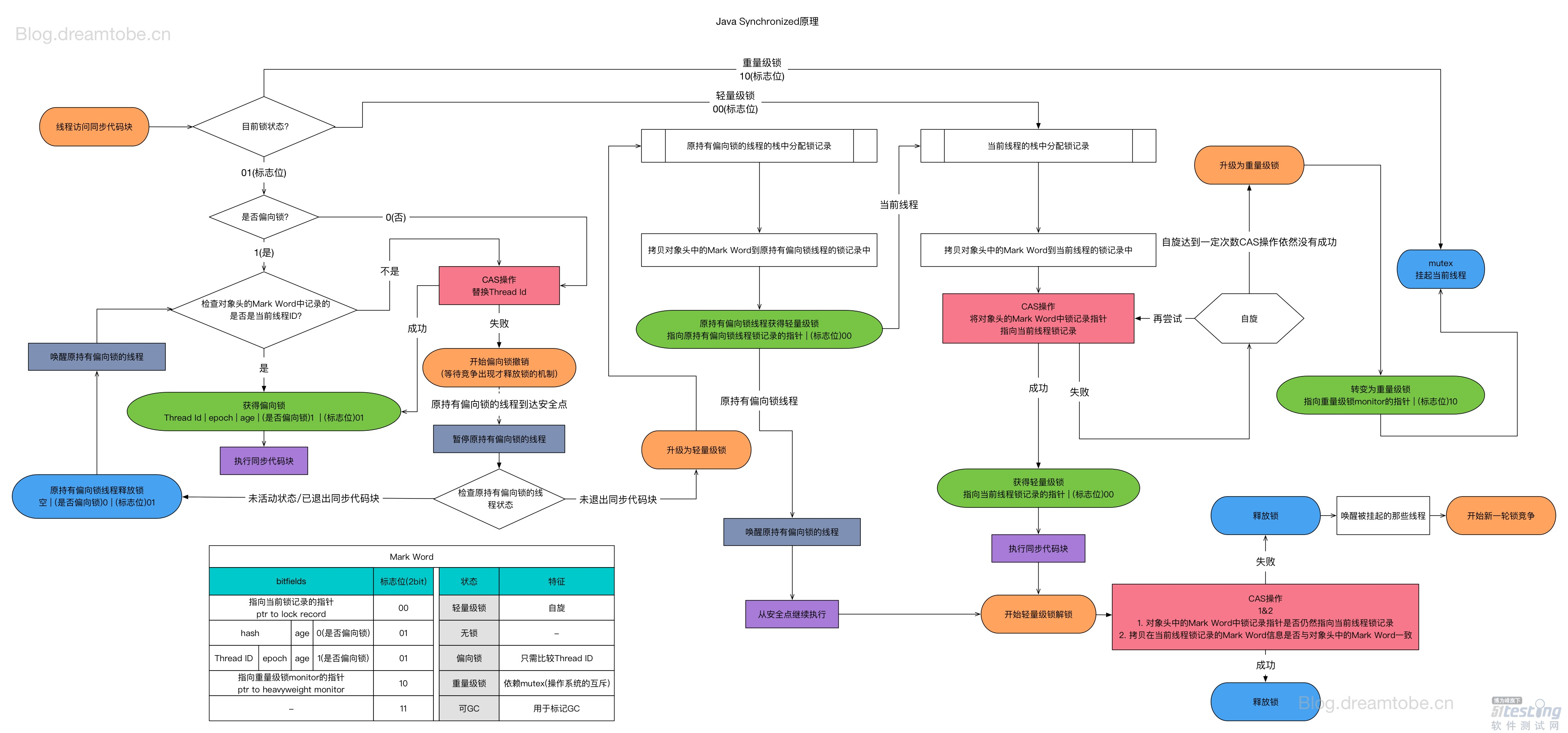
锁的状态
锁一共有四种状态(由低到高的次序):无锁状态,偏向锁状态,轻量级锁状态,重量级锁状态
锁的等级只可以升级,不可以降级。这种锁升级却不能降级的策略,目的是为了提高获得锁和释放锁的效率。
偏向锁
大多数情况下,锁不仅不存在多线程竞争,而且总是由同一个线程多次获得,为了让线程获得所得代价更低而引入了偏向锁,当一个线程访问同步代码块并获取锁时,会在线程的栈帧里创建lockRecord,在lockRecord里和锁对象的MarkWord里存储线程a的线程id.以后该线程在进入和退出同步块时不需要进行CAS操作来加锁和解锁,只需简单地测试一下对象头的Mark Word里是否存储着指向当前线程的偏向锁。如果测试成功,表示线程已经获得了锁。如果测试失败,说明是其他线程访问这个对象,因为偏向锁不会主动释放,所以第二个线程可以看到对象时偏向状态,这时表明在这个对象上已经存在竞争了,检查原来持有该对象锁的线程是否依然存活,如果挂了,则可以将对象变为无锁状态,然后重新偏向新的线程,如果原来的线程依然存活,则检查该对象的使用情况,如果仍然需要持有偏向锁,则偏向锁升级为轻量级锁(偏向锁就是这个时候升级为轻量级锁的)。如果不存在使用了,则可以将对象回复成无锁状态,然后重新偏向。
轻量级锁
线程在执行同步块之前,JVM会先在当前线程的栈桢中创建用于存储锁记录的空间,并将对象头中的Mark Word复制到锁记录中,然后线程尝试使用CAS将对象头中的Mark Word替换为指向锁记录的指针。如果成功,当前线程获得锁,如果失败,表示其他线程竞争锁,当前线程便尝试使用自旋来获取锁。如果,完成自旋策略还是发现线程没有释放锁,或者让别的线程占用,则线程试图将轻量级锁升级为重量级锁。
轻量级锁认为竞争存在,但是竞争的程度很轻,一般两个线程对于同一个锁的操作都会错开,或者说稍微等待一下(自旋),另一个线程就会释放锁。 但是当自旋超过一定的次数,或者一个线程在持有锁,一个在自旋,又有第三个来访时,轻量级锁膨胀为重量级锁,重量级锁使除了拥有锁的线程以外的线程都阻塞,防止CPU空转。
重量级锁
就是让争抢锁的线程从用户态转换成内核态。让cpu借助操作系统进行线程协调。
具体流程
每一个线程在准备获取共享资源时:
第一步,检查MarkWord里面是不是放的自己的ThreadId ,如果是,表示当前线程是处于 “偏向锁”.跳过轻量级锁直接执行同步体。
第二步,如果MarkWord不是自己的ThreadId,锁升级,这时候,用CAS来执行切换,新的线程根据MarkWord里面现有的ThreadId,通知之前线程暂停,之前线程将Markword的内容置为空。
第三步,两个线程都把对象的HashCode复制到自己新建的用于存储锁的记录空间,接着开始通过CAS操作,把共享对象的MarKword的内容修改为自己新建的记录空间的地址的方式竞争MarkWord.
第四步,第三步中成功执行CAS的获得资源,失败的则进入自旋.
第五步,自旋的线程在自旋过程中,成功获得资源(即之前获的资源的线程执行完成并释放了共享资源),则整个状态依然处于轻量级锁的状态,如果自旋失败
第六步,进入重量级锁的状态,这个时候,自旋的线程进行阻塞,等待之前线程执行完成并唤醒自己.
偏向锁,轻量级锁,重量级锁对比
| 锁 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 偏向锁 | 加锁和解锁不需要额外的消耗,和执行非同步方法相比仅存在纳秒级的差距 | 如果线程间存在锁竞争,会带来额外的锁撤销的消耗 | 适用于只有一个线程访问同步块场景(只有一个线程进入临界区) |
| 轻量级锁 | 竞争的线程不会阻塞,提高了程序的响应速度 | 如果始终得不到索竞争的线程,使用自旋会消耗CPU | 追求响应速度,同步块执行速度非常快(多个线程交替进入临界区) |
| 重量级锁 | 线程竞争不使用自旋,不会消耗CPU | 线程阻塞,响应时间缓慢 | 追求吞吐量,同步块执行速度较慢(多个线程同时进入临界区) |
如果上面的没看懂,可以先看看下面形象的例子:
打个比喻,假设你要回家上厕所,你要关上家里的大门,再关上自己房间的门,再关上房间厕所的门。如果你是一个人在家的话,那么其实只要关上家里的大门就好了,没人会来跟你抢上厕所(或者偷窥你~),就不用关上房间门和厕所门了,这就是偏向锁,只是你一个人的情况时才有用,即一个线程在获取锁的时候,重入的时候就不用做任何操作了,这不是很省事嘛。
那,如果家里有人,你就不能这么做了,他可能会跟你抢厕所呢,这就是偏向锁膨胀成轻量级锁。这就是多个线程交替获取锁的情况。那这个时候又要怎么做呢?比如说你哥上着厕所了,你也想上厕所,你猜你哥上厕所的时间不会太久,于是你就在厕所门口等一会(自旋),以前synchronized的方案就是让你回房间躺着等(阻塞),可能回房间的时间都比你拉尿的时间长(挂起线程的时间比执行同步方法中的时间还要长的情况)。这就是轻量级锁。
接着上面的故事,当你等的有点久了,你会觉得你哥可能这次要上很久了,所以你就回房间等了(阻塞),这时候就从轻量级锁升级到重量级锁了。