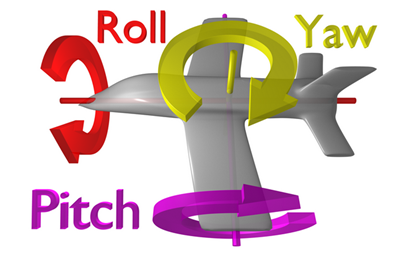
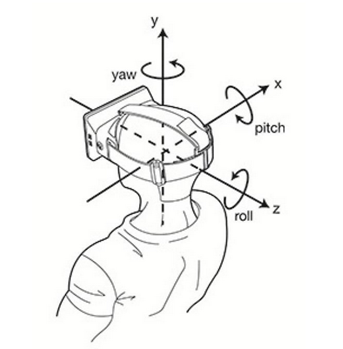
[build by hexo/next/gitalk/hexo-generator-search/LaTeX]"> pitch、yaw、roll 发表于 2020-03-16 分类于 机器视觉 在航空中,pitch、yaw、roll 下图所示。 pitch 是围绕 X 轴旋转,也叫做俯仰角。 yaw 是围绕 Y 轴旋转,也叫偏航角。 roll 是围绕 Z 轴旋转,也叫翻滚角。 在 3D 系统中,假设视点为原点,则视点坐标系如下图所示,通常 z 轴的负方向是视点方向(OpenGL)。